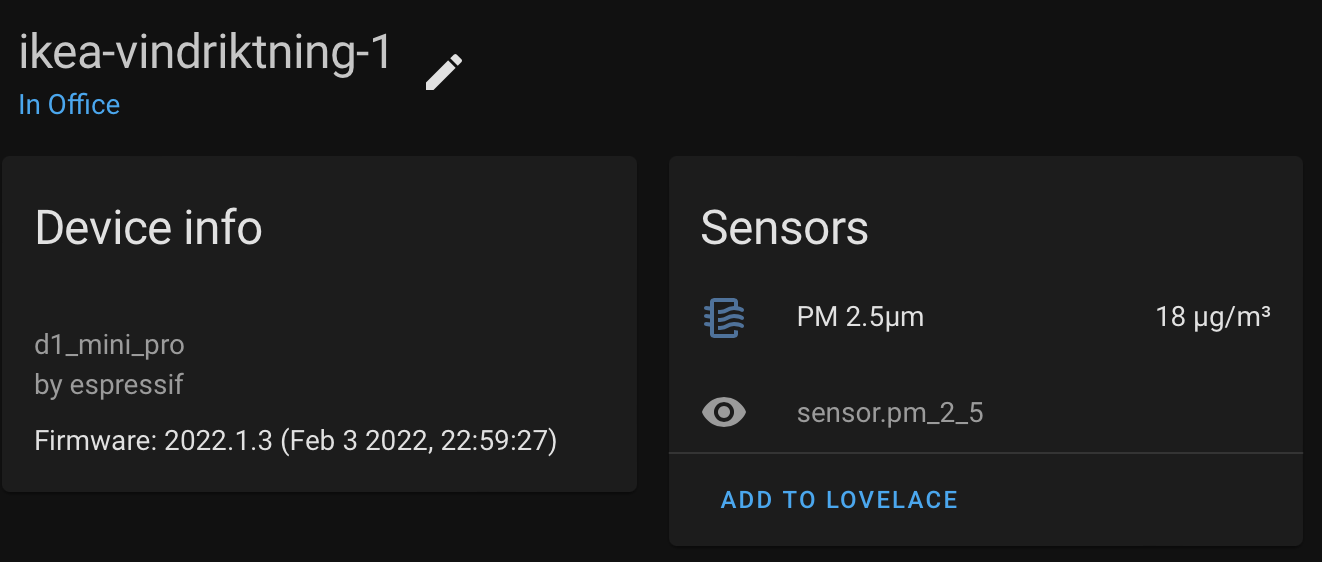
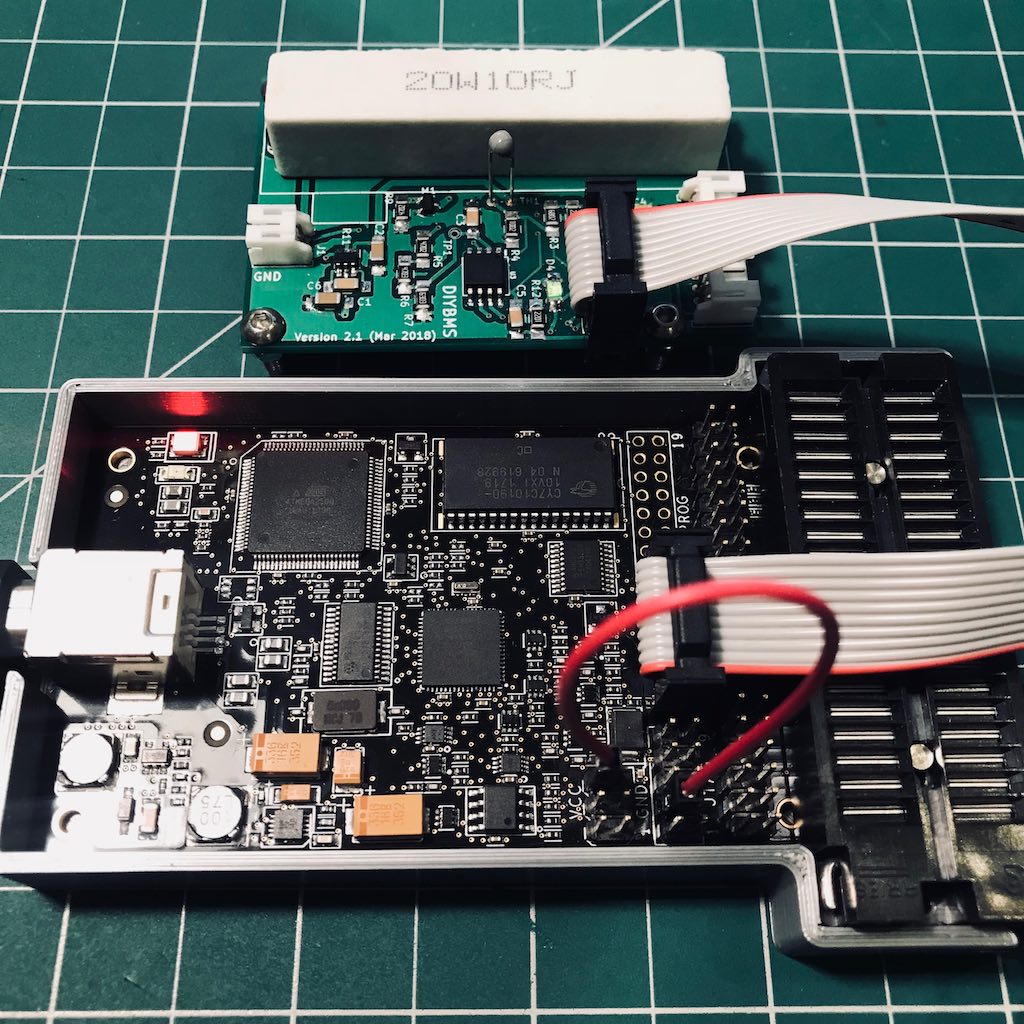
The IKEA VINDRIKTNING is a simple and cheap ($15 AUD) air quality sensor that measures PM 2.5 particulate matter. It’s easy to attach an ESP8266 to three test points on the device’s PCB to read the communication between the sensor and the onboard IC.
I have published a small project based on the excellent work of Soren Beye in the Hypfer/esp8266-vindriktning-particle-sensor project that wraps the functionality into a custom ESPHome external component that can be pulled into any ESPHome configuration. The full source is available on GitHub.